Work packages
Models and feedback
The MID, modelling tools and feedback control for the process are developed to utilise the information provided by integrated analysis platform.
The purpose of this WP is to develop models to exploit available data and put in place feedback controls based on these models, which may be applied directly either to a small scale laboratory process development setting, or (with potential adjustments to suit the GMP environment) in a GMP clinical or commercial manufacturing environment.
Introduction
Animal cell culture modelling
Modelling aims at generating optimisation and prediction tools and is addressed here in two ways:
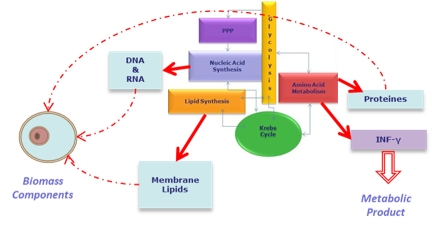
i) mechanistic modelling of the cell metabolism and product glycosylation (or other post-translational modifications), which also provides a better understanding of the cell culture.
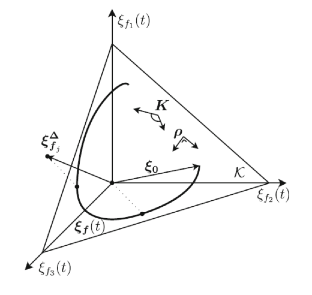
ii) data-driven dynamic models with adjustable complexity levels based on the data information.
Software sensor & Controller
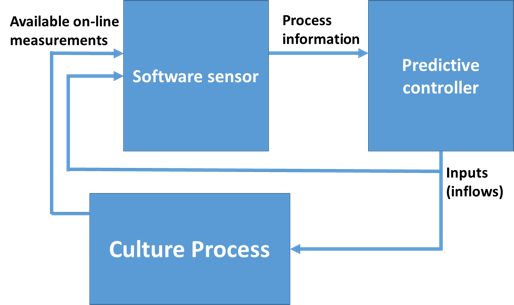
Perfusion and fed-batch animal cell cultures require tight control of metabolites. To this purpose, an advanced monitoring is required through the use of available on-line hardware sensors but also software sensors taking advantage of the available mathematical models to reconstruct possible missing signals/information and feeding robust nonlinear model predictive controllers.
Objectives
- Build several mechanistic/data-driven models based on MID data and available for both bioreactor/MBR under particular practical specifications (control-oriented vs very descriptive) influencing their complexity level.
- Provide software sensors allowing to reconstruct (on-line/in-line/at-line) unmeasurable or difficult-to-measure (poor signal quality or hard practical aspect) signals using the available mathematical models. These software sensors can also be used to improve the quality of already available on-line measurements using mathematical model knowledge.
- Provide model-based predictive and robust controllers of the metabolite concentrations taking into account possible signal disturbances (noise or faults) and model parameter uncertainties.
Leader and co-leader
University of Mons
Pfizer
Partners
KTH
Ipratech
Rentschler
Synthon
UCB